长期以来,机械手一直难以达到与人类同类一样的灵活性和多功能性。虽然传统工业机器人依靠简单的夹持器或吸盘来完成操作任务,但这些解决方案在精确和灵敏地处理各种物体方面却存在不足。
为了弥补这一差距,苏黎世联邦理工学院和南洋理工大学的研究人员开发了一种新解决方案:用于机械手的传感器软皮肤。通过这种方法,研究人员的目标是为机械手配备类似于人手的触觉感知能力。
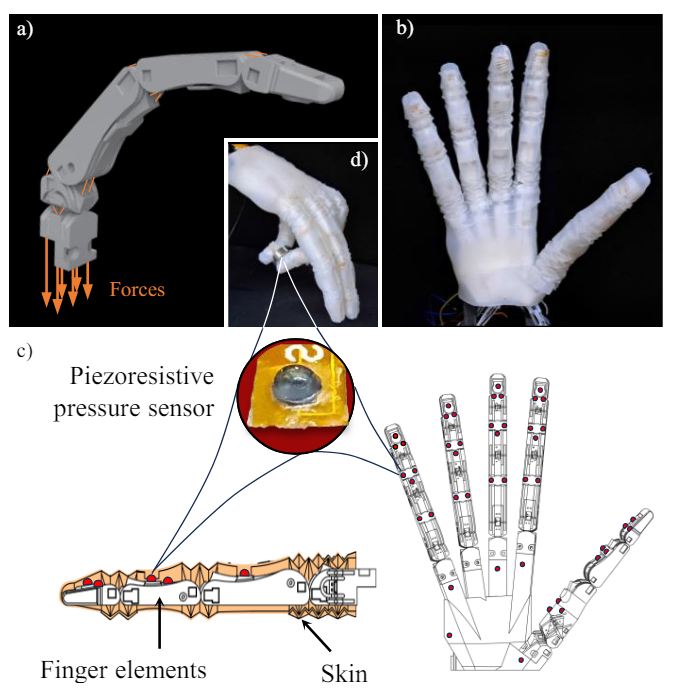
仿生肌腱驱动手配有滚动接触关节。(图片来源:苏黎世联邦理工学院/新加坡南洋理工大学)
由于人类双手结构复杂且内嵌触觉传感器,它们拥有非凡的感知和操控物体的能力。虽然机器人在利用视觉反馈模仿人类操控技能方面取得了长足进步,但触觉感知已被确定为进一步增强机器人能力的关键组成部分。
传统的机器人夹持器通常缺乏精细物体操作所需的结构复杂性和柔软特性。为了解决这一限制,研究团队专注于开发一种可以包裹机器人手的柔软皮肤,提供关节保护并增加接触面积以改善抓握能力。
研究人员利用多材料 3D 打印和折纸设计等先进技术,制作出保持灵活性和耐用性的复杂皮肤几何形状原型。通过在硅胶中铸造最终皮肤设计,他们确保了机械手的光滑和坚固覆盖。

3D 打印的折纸皮肤。(图片来源:苏黎世联邦理工学院/新加坡南洋理工大学)
该项目的核心是将压阻式压力传感器集成到柔软的皮肤中。这些传感器被策略性地放置在机械手的关键接触区域,可以检测物体的抓握情况并评估握力。这种传感反馈系统模仿了人手的本体感受能力,使机械手能够更有效地与周围环境互动。
为了评估解决方案的有效性,研究团队进行了一系列动态和静态测试。结果表明,与传统设置相比,配备传感器软皮的机械手的运动范围和握力有显著改善。
机器人手的传感软皮的开发代表着机器人技术领域的一大进步。它不仅提高了机器人操作的灵活性和多功能性,还为从制造业到医疗保健等各个领域更复杂的人机交互打开了大门。
相关文章





























