一组研究人员开发了两种处理点云的新算法,可以显着提高 3D 扫描的质量。该方法特别针对边缘和复杂结构的精确检测。
对物体进行 3D 数字化时,扫描会经历多个处理步骤。在扫描仪实际记录后(无论是摄影测量、激光还是结构光),首先创建点云。然后必须分析这些三维数据集以识别表面、曲线和边缘。只有这样才能创建完整的3D模型。
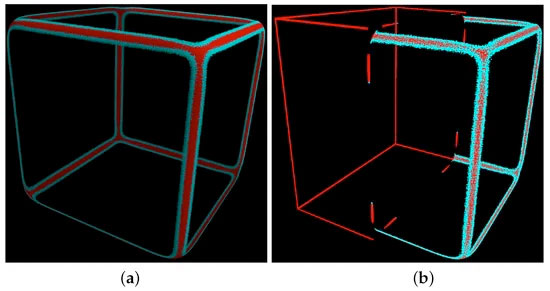
新算法正是针对这一关键分析步骤。第一个算法“双 3D 边缘提取”不仅可以检测扫描数据中的锐边,还可以检测软边缘。这一点尤其重要,因为真实的物体通常具有两种类型的边缘。第二种算法“不透明度颜色渐变”可创建颜色和透明度的平滑过渡。这意味着可以更好地显示精细结构,并改善 3D 边缘的深度感知。
计算要求仍然在限制范围内:研究人员能够在配备 M2 Max 芯片和 96 GB RAM 的 MacBook Pro 上成功测试算法。即使在功能较弱的系统上(例如配备 Intel Core i7 和 8 GB RAM),也可以处理最多 108 个 3D 点的数据集。计算时间与传统方法的水平相似。
实际测试显示出显着的改进:在复杂的扫描中,与以前的方法相比,可以正确识别更多的细节和边缘。这可以显着提高 3D 打印的 3D 模型的质量。
【特别声明】本站部分内容来源于互联网,仅供个人用于学习、研究,不得用于商业用途。如有关于文章内容、版权或其它问题请及时联系我们修正或删除(微信:18923725282 / 邮箱:454884888@qq.com)。
相关文章





























3D打印行业名录,为3D打印从业者精心打造!!本站汇集了全球3D打印产业链资源信息及行业资讯、智库等精品内容,实时更新,供3D打印从业者查阅、参考。
